实验流程:(1)了解机器人以及任务环境的参数以及输入输出变量,定义任务奖励。(2)针对四足机器人摔倒后恢复站立姿态的任务,设计神经网络与奖励函数。(3)在仿真环境中对神经网络进行测试迭代,优化性能。(4)在仿真环
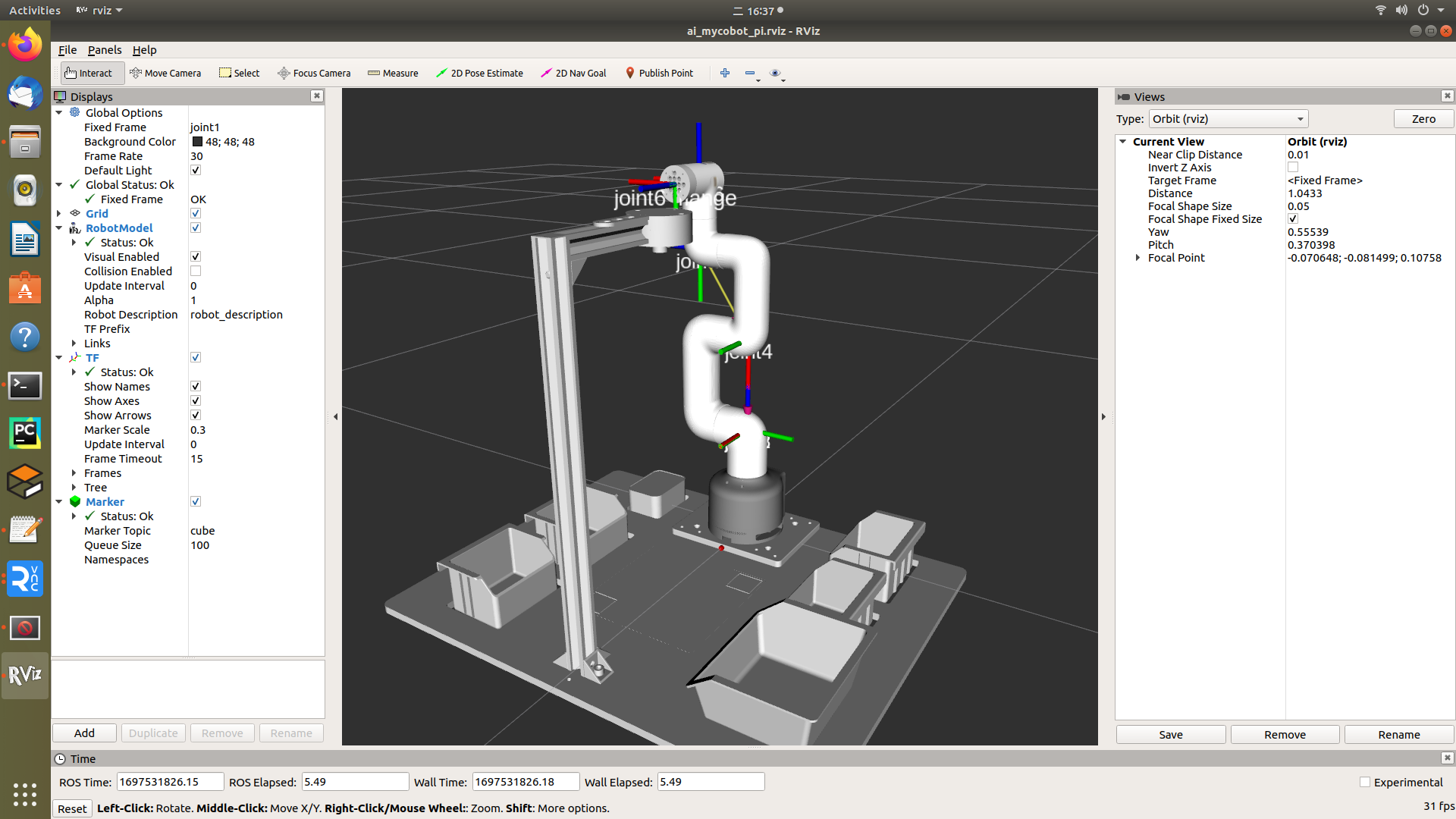
实验流程:(1)导入物品模型与机器人URDF模型。(2)确认仿真中产生的各种信息状态正常与否。(3)使用RViv设置机器人目标位置,并用MoveIT!生成运动轨迹。(4)执行并观察仿真中机器人的变化。(5)使用MoveIT!中的Py
18680748866
marketing@amigaga.com
3040594859
扫码添加微信
 提交成功!
提交成功! 5s内不可重复提交!
5s内不可重复提交!


 扫码添加微信
扫码添加微信