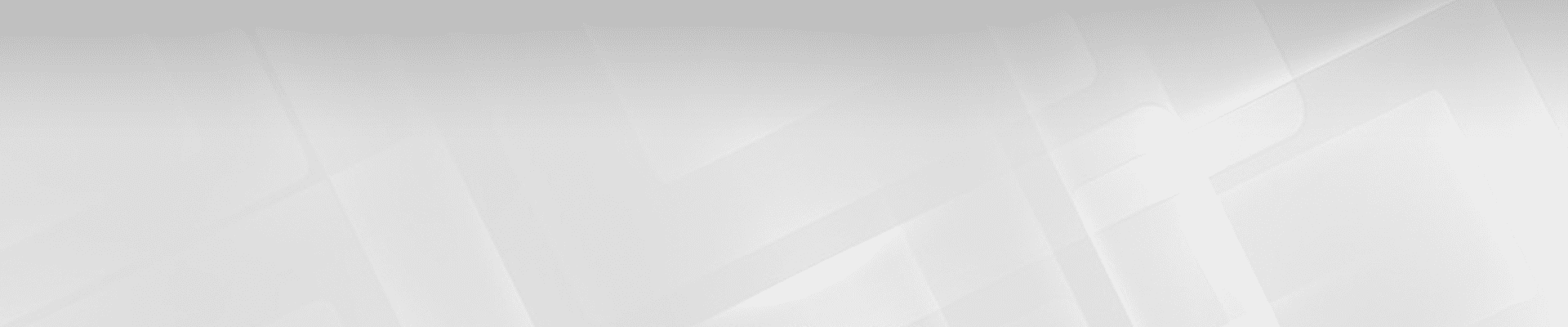

实验流程:(1)构建四足机器人的运动学模型。(2)设计机器人的一种站立姿态,设置弹性系数及阻尼系数,通过关节空间阻抗控制(PD控制),使机器人达到指定姿态。(3)确认机器人的悬挂保护,用手摇晃机器人,感受相互

实验流程:(1)使用改进DH表达法对机器人进行建模。(2)给定关节角度,使用正运动学的方法简化并求解执行器末端位置。(3)控制机器人关节到给定角度,肉眼对比实际位置与理论预测位置的大致偏差。(4)给定关节角度,使

实验流程:(1)使用改进DH表达法对机器人进行建模。(2)给定执行器末端目标位置,使用逆运动学的方法理论求解关节角度。(3)控制机器人关节到给定角度,肉眼对比目标位置与实际到达位置。(4)给定执行器末端目标位置,
实验流程:(1)根据一条线段,设置起始点和终点。(2)使用关节空间轨迹插补法,生成运动轨迹。(3)在仿真和实体机器人上执行生成的轨迹。(4)观察机械臂的运动轨迹并分析与预期的差别。(5)使用操作空间轨迹插补法,生成

实验流程:(1)分析机械臂的构型及环境特点。(2)选取合适的机械臂运动轨迹规划算法,完善代码关键部分,实现设置目标关节位置后在无障碍仿真环境中机械臂各关节的运动规划。(3)改进代码,实现不同目标末端位置条件下
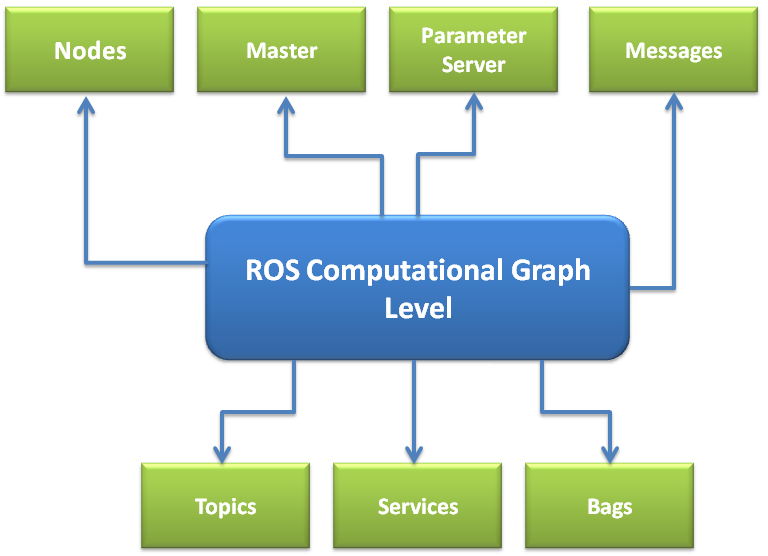
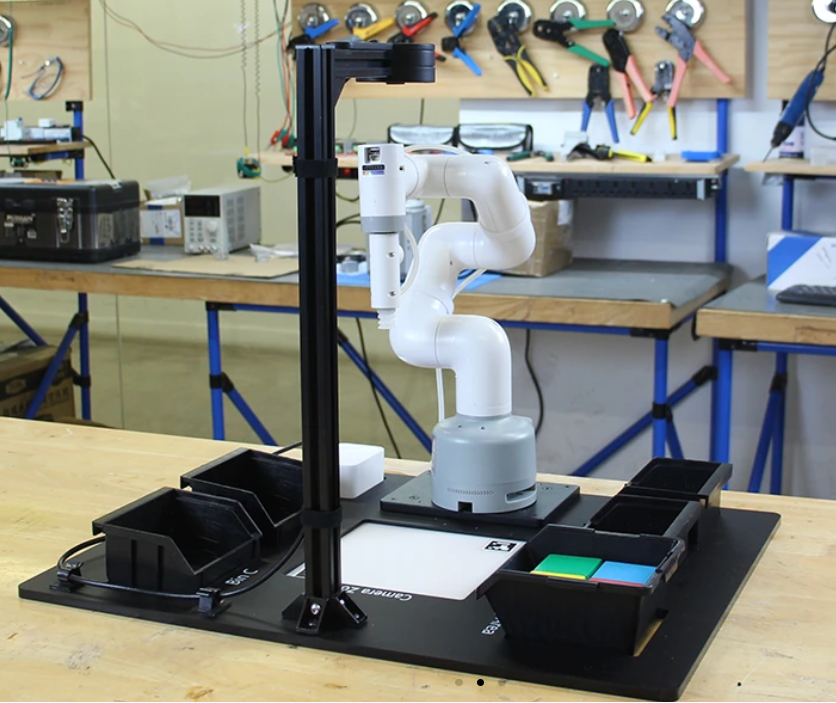
实验流程:(1)ROS的安装与设置。(2)ROS文件系统的初始化与编译。(3)ROS节点、topic的建立。(4)基于rqt的状态监测与调试。(5)创建ROS消息。(6)编写发布者和订阅者。(7)基于ROSbag的数据抓取
 提交成功!
提交成功! 5s内不可重复提交!
5s内不可重复提交!

微信公众号

微信视频号
18680748866
marketing@amigaga.com
3040594859
 扫码添加微信
扫码添加微信

